Director:
PhD., MSc., EE. Juan Carlos Travieso Torres PMP
This laboratory investigates solutions for global problem applications using optimal and robust adaptive control of complex dynamical systems. Current projects include expanding adaptive system theories for nonlinear systems and applications, including wetlands health assessment to help climate change, extra energy savings of electrical motor drives, and improved process control strategies.
PROTOTYPE for “Research and Development of an IT Platform for Diagnosis, Prediction, and Online Visualization of Wetlands Comprehensive Health.”
The project developed a laboratory prototype TRL 2 with a level of an IT platform for wetlands health assessment, which is interconnected with two monitoring platforms, clients monitoring information platforms, and Google earth engine. It considers that as a contribution to mitigating climate change, the United Nations (UN) finds it crucial to revitalize and restore Wetlands, which include lakes, rivers, underground aquifers, swamps and marshes, wet grasslands, peatlands, oases, estuaries, deltas, mangroves, coral reefs, artificial fish ponds, reservoirs, salt flats, etc. Despite their importance, wetlands are one of the most threatened habitats on Earth, with around 85% of them having been lost between 1700 and 2000, many drained, neglected, or overexploited.
ANID IT23I0117 / FONDEF ID17210338 / FONDEF ID17I10338, “Research and Development of an Electronic Feeder for Maximum Efficiency of Induction Motors.”
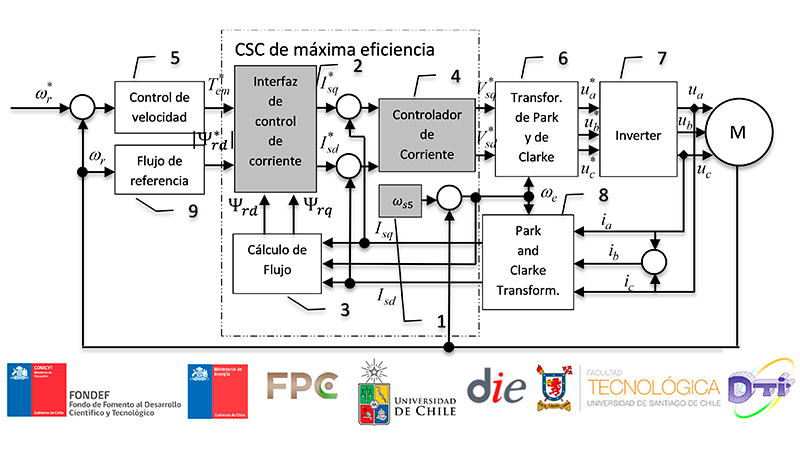
These projects developed two prototypes, TRL 3 and TRL 5, of optimal ac drives with a constant slip control (CSC) method after considering that the efficient energy use of induction motors (IM) is vital. From 1995 to 2018, the world population increased by 2 billion (33%, from 5.7 billion to 7.6 billion). As a result, the global electricity consumption doubled from 1991 (11.3 TWh) to 2018 (22.9 TWh), with 45% of this consumption corresponding to electric motors in 2011, mainly IM. By 2040, the world electricity consumption will have tripled (35 TWh).
Two Chilean patent applications, 201603397 and 201903794, have been presented. The first was named "Indirect Control Method for Constant Slip Control of Asynchronous Electrical Machines for High Control Features." The last is "Constant Slip Control Method for Maximum Efficiency of Asynchronous Electric Machines".
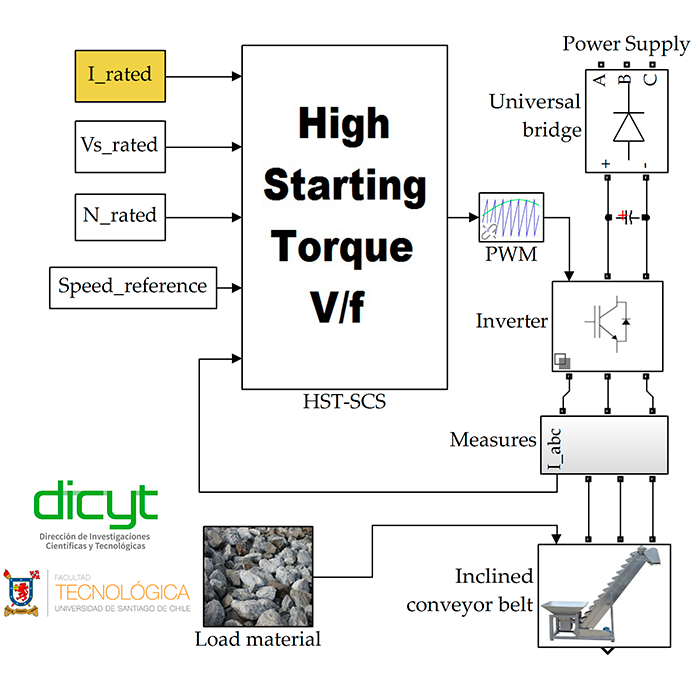
DICYT 082078TT_TEC “Development of a high starting torque Scalar Control Scheme for Induction motor Drives.”
This project proposes a new scalar control method for induction motors that ensures 100% of the motor's nominal torque at the start. It surpasses the classic Scalar Control strategy, which only provides around 25% of starting torque. Both schemes remain open-loop speed control, ensuring between 2% and 3% steady-state speed accuracy for low-performance control loads.
The investigated method considers an adaptive current controller that does not use knowledge of motor and load parameters. The main advantage is to broaden the range of scalar control applications to move higher starting torque loads that do not require greater precision while maintaining the simple and economical implementation of scalar control without variable observers or parameter estimators like others more complex and expensive methods.
FONDECYT 1190959 “Development of Fractional Order Tools for Stability, Estimation, and Control of Systems and Applications.”
The expansion of adaptive control theories for nonlinear dynamical systems without linear explicit parametric dependence is this lab's project research area. It considers different adaptive control schemes like MRAC and APBC. The main goal is to expand mathematical theories of adaptive control, avoiding trial and error tunings as much as possible.


Main Staff











- Ezequiel Cornejo, Graduated Student
- Bastián Cabeza, Graduated Student
- Gabriel Neculhual, Graduated Student
- Maximiliano Silva, Graduated Student
- Sebastian Molina, Postgraduated Student
- Francisco Hernández, Graduated Student
- Ritchie Vargas, Graduated Student
- Daniel Galdames, Graduated Student
- Alejandro Álvarez, Graduated Student
- Marcos Cerda, Graduated Student






